nqc
RCX-Omni
An omidirectional robot programmed using NQC.
- The associated code may be found under the repository site.
- It works around RCX limitations primarily using a lookup table for trig, as RCX 1.0 did not support trig or floats.
Design
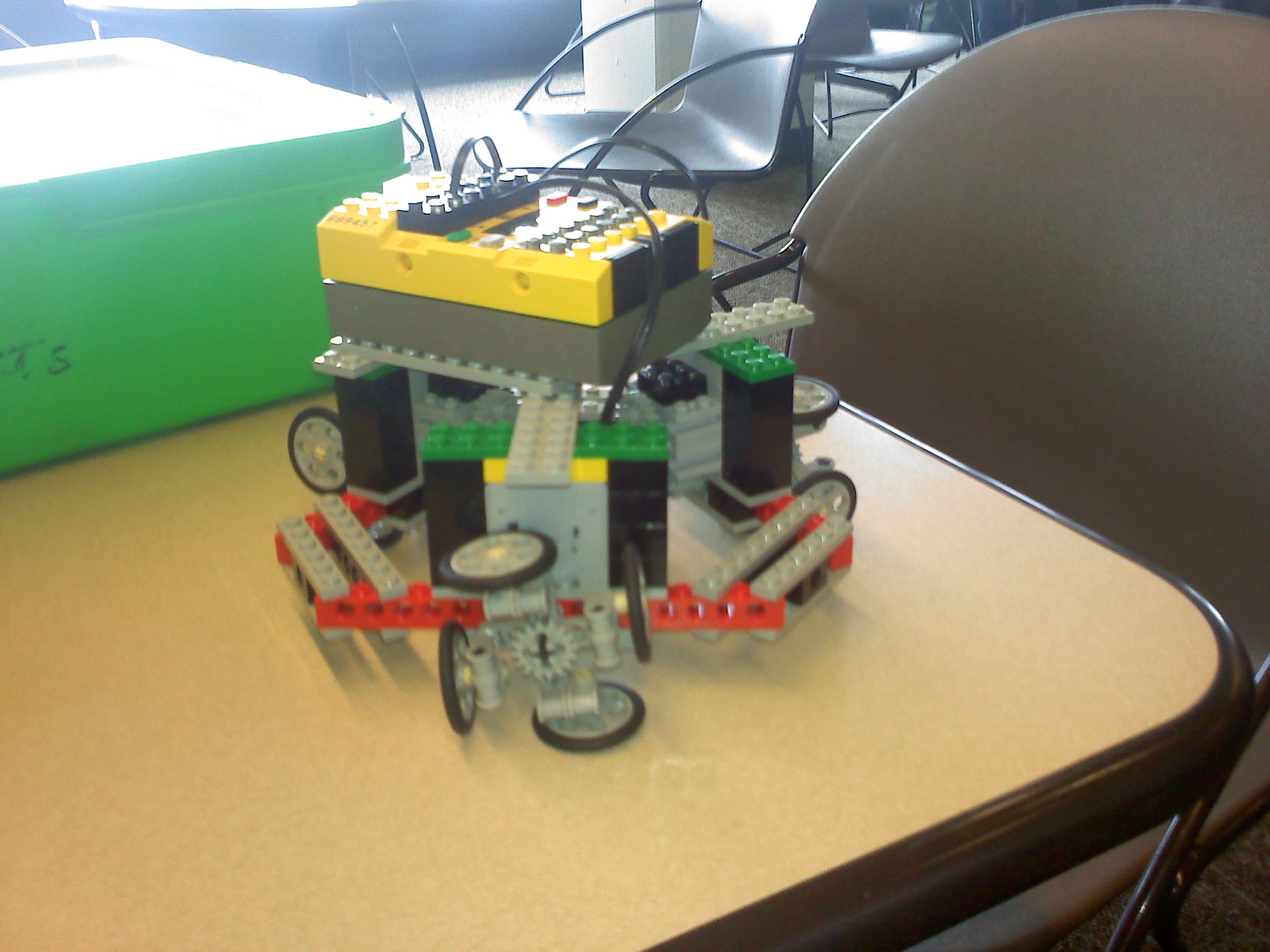
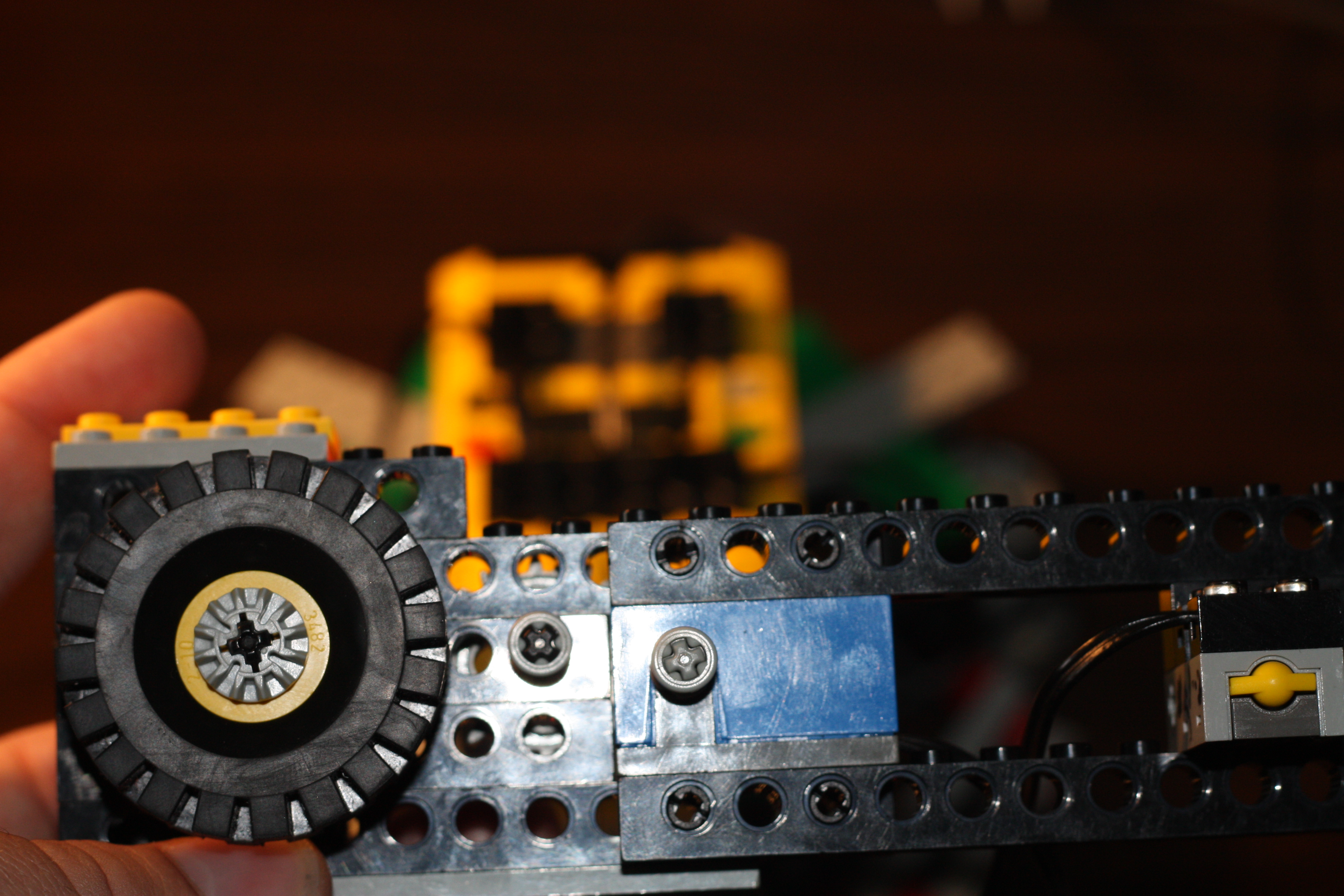
To replicate the hardware setup, see the images Robot.jpg, Wheel.jpg, and Remote.jpg below. Details:
- Three motor outputs on an equilateral triangle frame (see Robot.jpg).
- Each motor output should have an omniwheel or Lego Omniwheel. My design for this wheel is shown in Wheel.jpg
- Robot is controlled with a rotation sensor on Sensor 1, a “reset bearing” button on sensor 2, and a “go” button on sensor 3
- Which output goes to which motor is undocumented…
Images

- For CSCI 172 at Western Washington University in Spring quarter of 2010
- Written 3-10-2010 and Released to Public Domain 3-13-2014 under the Unlicense